Najpopularniejsze kategorie
Pozostałe kategorie
Najpopularniejsi autorzy
Bestseller

- -11%
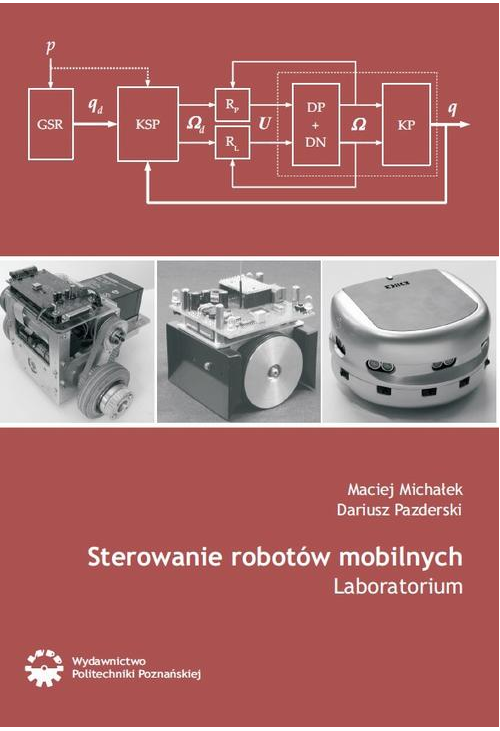
ebook Sterowanie robotów mobilnych. Laboratorium
Maciej Michałek, Dariusz Pazderski
Wydawca:
Wydawnictwo Politechniki Poznańskiej
Rok wydania:
2012
Niniejszy skrypt jest przewodnikiem do zajęć laboratoryjnych z zakresu modelowania kołowych robotów mobilnych i sterowania nimi. Układ treści odpowiada tematyce zajęć laboratoryjnych prowadzonych w ramach przedmiotu sterowanie robotów mobilnych na kierunku automatyka i robotyka Wydziału Informatyki Politechniki Poznańskiej. Celem autorów było przedstawienie i systematyzacja zagadnień kołowej robotyki mobilnej w taki sposób, aby Czytelnik mógł samo-dzielnie wykonać wszystkie ćwiczenia sugerowane na końcu wybranych rozdziałów bez ko-nieczności istotnego odwoływania się do literatury dodatkowej. Treści merytoryczne zawarte w skrypcie będą pomocne w zrozumieniu i przyswojeniu zagadnień poruszanych w ramach wy-kładu o tym samym tytule. Skrypt jest przeznaczony przede wszystkim dla studentów studiów drugiego stopnia (studia magisterskie) na kierunku automatyka i robotyka, lecz może być także pomocny w kształceniu na kierunkach pokrewnych, takich jak mechatronika czy informatyka.
Spis treści ebooka Sterowanie robotów mobilnych. Laboratorium
Spis symboli, operatorów i skrótów 7Przedmowa 13
1. Problematyka sterowania robotami mobilnymi 19
1.1. Zagadnienia wstepne 19
1.2. Robot mobilny klasy (2,0) 25
1.3. Problem sterowania ruchem 26
1.4. Opis matematyczny robota w przestrzeni zadania 29
1.4.1. Przestrzen konfiguracyjna 32
1.4.2. Chwilowy srodek obrotu 34
1.5. Zadania ruchu i zadania sterowania 35
1.5.1. Zadanie sledzenia trajektorii 36
1.5.2. Zadanie sterowania do punktu 38
1.5.3. Zadanie podazania wzdłuz sciezki 39
1.5.4. Pozycyjne zadania ruchu 42
1.5.5. Problem unikania kolizji z przeszkodami 44
2. Model matematyczny robota mobilnego 47
2.1. Kinematyka platformy 47
2.2. Dynamika platformy 52
2.3. Modelowanie nasycenia sygnałów sterujacych 65
2.4. Cechy modelu robota klasy (2,0) 67
2.4.1. Sterowalnosc 67
2.4.2. Wskazniki kinematyczne 70
2.4.3. Rózniczkowa płaskosc 71
2.4.4. Linearyzacja modelu kinematyki 72
2.5. Przebieg cwiczenia I 75
3. Sygnały i struktura układu sterowania 77
3.1. Generator sygnałów referencyjnych 77
3.1.1. GSR dla zadania sledzenia trajektorii 78
3.1.2. GSR dla zadania sterowania do punktu 82
3.1.3. GSR dla zadania podazania wzdłuz sciezki 82
3.2. Kaskadowa struktura układu sterowania – wymuszenie predkosciowe 85
3.2.1. Synteza podrzednych obwodów regulacji predkosci 88
3.2.2. Skalowanie sygnałów sterujacych petli nadrzednej 95
3.3. Kaskadowa struktura układu sterowania – wymuszenie momentowe i napieciowe 99
3.4. Fundamentalne ograniczenia w sterowaniu platforma 105
3.5. Przebieg cwiczenia II 107
4. Sterowniki wynikajace z technik linearyzacji 113
4.1. Uwagi wstepne 113
4.2. Algorytm dla zadania sledzenia trajektorii 114
4.2.1. Wyprowadzenie równania dynamiki błedu sledzenia 114
4.2.2. Projektowanie reguły sterowania 116
4.2.3. Parametryczna synteza sterownika 118
4.3. Algorytm dla zadania podazania wzdłuz sciezki 121
4.3.1. Wyprowadzenie równan dynamiki błedów odtwarzania 122
4.3.2. Projektowanie reguły sterowania 125
4.3.3. Parametryczna synteza sterownika 126
4.4. Algorytm dla zadania odtwarzania pozycji 129
4.4.1. Definicja wyjsc linearyzujacych 130
4.4.2. Projektowanie reguły sterowania 132
4.4.3. Parametryczna synteza sterownika 133
4.5. Przebieg cwiczenia III 135
5. Ciagły sterownik Pometa jawnie zalezny od czasu 139
5.1. Uwagi wstepne 139
5.2. Dynamika przekształconego błedu stabilizacji 140
5.3. Projektowanie reguły sterowania 141
5.4. Wybór funkcji pobudzajacej i parametryczna synteza sterownika 147
5.5. Przebieg cwiczenia IV 148
6. Sterowniki nieciagłe metody VFO 151
6.1. Uwagi wstepne 151
6.2. Ogólna postac równan sterownika VFO 151
6.3. Algorytm VFO dla zadania sledzenia trajektorii 155
6.3.1. Definicja sterownika 155
6.3.2. Parametryczna synteza sterownika 157
6.4. Algorytm VFO dla zadania sterowania do punktu 158
6.4.1. Definicja sterownika 158
6.4.2. Parametryczna synteza sterownika 161
6.5. Przebieg cwiczenia V 162
7. Opis stanowisk laboratoryjnych 165
7.1. Ogólne wytyczne dotyczace pracy z robotami mobilnymi na stanowiskach laboratoryjnych 165
7.2. Stanowiska z robotami MTV3 oraz Kh3 166
7.2.1. Zasady pracy z robotem MTV3 i opis oprogramowania w srodowisku Matlab 169
7.2.2. Zasady pracy z robotem Kh3 i opis oprogramowania w srodowisku Matlab 174
7.3. Stanowisko z robotem MMS-UMR 177
8. Uzupełnienia 187
8.1. Fundamentalny wniosek z twierdzenia Brocketta 187
8.2. Model dynamiki robota z przesunietym srodkiem masy 188
8.3. Uwagi na temat szybkosci zbieznosci 192
8.4. Alternatywne sposoby syntezy sterownika (4.18) 195
8.5. Nieliniowe wersje sterowników opisanych w rozdziale 4 198
8.5.1. Nieliniowa wersja sterownika dla zadania sledzenia trajektorii 198
8.5.2. Nieliniowa wersja sterownika dla zadania podazania wzdłuz sciezki 198
8.6. Unormowana parametryzacja sciezki 199
8.6.1. Sciezka prostoliniowa 199
8.6.2. Sciezka w postaci okregu 201
8.7. Sposób obliczania funkcji Atan2c (·, ·) 202
8.8. Wybrane kryteria porównawcze algorytmów sterowania 203
8.8.1. Porównanie algorytmów z uwzglednieniem kryterium Kr1 207
8.8.2. Porównanie algorytmów z uwzglednieniem kryterium Kr5 210
8.9. Procedura odometrii jako metoda lokalizacji robotów 213
8.10. Interfejs programowy dla robota Kh3 w srodowisku Matlab 215
8.11. Implementacja modeli w srodowisku Matlab-Simulink 219
Bibliografia 225
Indeks 231
Szczegóły ebooka Sterowanie robotów mobilnych. Laboratorium
- ISBN:
- 9788377751848
- Wydawca:
- Wydawnictwo Politechniki Poznańskiej
- Rok wydania:
- 2012
- Typ publikacji:
- Ebook
- Język:
- polski
- Format:
- Liczba stron:
- 234
- ISBN dla wersji papierowej:
- 9788377751848
Recenzje ebooka Sterowanie robotów mobilnych. Laboratorium
-
Reviews (0)

Na jakich urządzeniach mogę czytać ebooki?
- -11%
-11%
52,00 zł
46,30 zł




@CUSTOMER_NAME@
@COMMENT_TITLE@
@COMMENT_COMMENT@